Register here
Register here
Embark on an exciting journey into the ever-evolving realm of tele-operated robots, where the fusion of scientific inquiry and technological innovation paints a vivid tapestry of possibilities. In this captivating exploration, the focal point extends beyond the mere study of remote-controlled robotic bodies; it aims to unravel the profound human experience of presence from a distance. As we navigate through this transformative landscape, our quest transcends the boundaries of understanding to envision a future where practical applications empower individuals in navigating remote locations effortlessly and facilitating daily tasks.
At the forefront of these groundbreaking developments, the AI for Good Global Summit 2023 unveiled a session on Human-robot collaboration for manufacturing and physical assistance. Here, visionary concepts came to life, shining a spotlight on collaborative manufacturing robots for small and medium businesses and assistive robots designed for healthcare applications, including prosthetic hands.
Delve into the wonders of these assistive robots as we explore the innovative projects discussed at the summit, including the pioneering research of Sylvain Calinon at the Idiap Research Institute for AI and machine learning. As a senior research scientist, Sylvain is on the cutting edge of developing AI techniques that not only enhance our understanding of human-robot collaboration but also aim to elevate the quality of life for individuals across various spectrums.
Human interaction and autonomous learning for robots in hazardous environments
Sylvain Calinon is at the forefront of research in the realm of assistive robots, particularly those like DexROV, that is designed for hazardous environments where human intervention is challenging. The emphasis lies in developing robots that can be remotely controlled by humans but possess a remarkable ability to emulate on-site human presence while executing intricate tasks. An intriguing aspect of this research is the exploration of imitation learning, a paradigm that seeks to enable robots to learn autonomously through human demonstrations. This innovative approach fosters a bilateral interaction between humans and robots, moving away from the conventional machine learning model. The researchers at Idiap Research Institute use the term “scaffold” to describe the process, akin to constructing a house. The idea is that, much like removing scaffolds once construction is complete, the robot can stand independently after training, only requiring human intervention if the task fundamentally changes.
“Robots can generalize learned skills to new situations, not just replay demonstrations”, noted Sylvain Calinon.
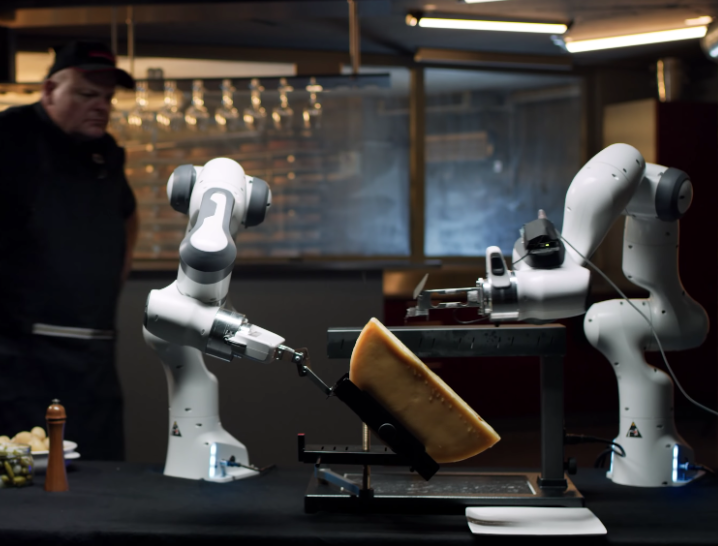
A prime example of learning through demonstration is the Swiss-designed robot, Roboclette, adept at scraping cheese. Trained through human demonstrations, Roboclette assimilates information from diverse sources, including built-in sensors that gauge pressure applied to the cheese. This multidimensional data, encompassing pressure and dynamic movement profiles, epitomizes the essence of generalization in robotic behavior.
Revolutionizing assistance with the dressing support robot
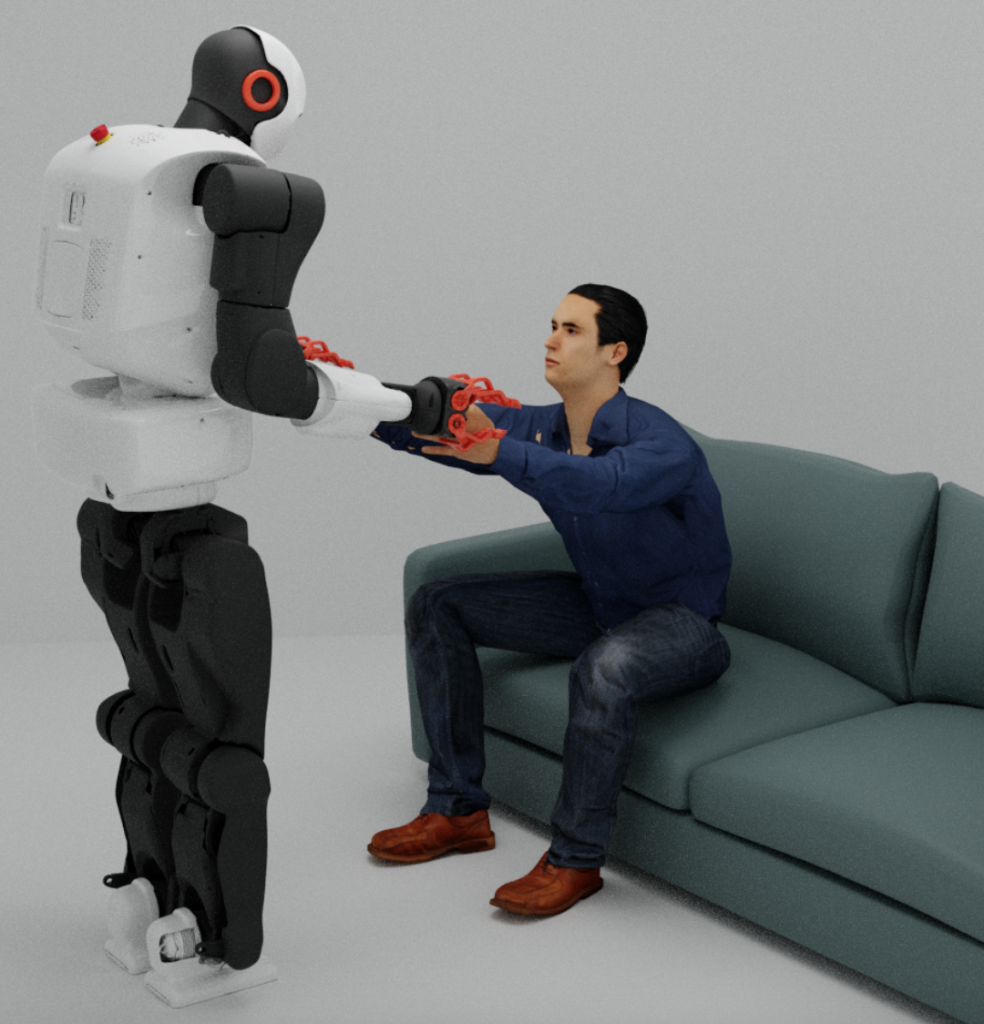
Groundbreaking advancements in assistive robotics continue to enhance the lives of individuals in need of support. One remarkable example is the I-DRESS robot, designed to assist with the often challenging task of dressing up. This innovative robotic companion has been programmed to engage in a unique three-party interaction, involving the caregiver, the robot, and the person seeking assistance. The caregiver provides essential demonstrations to the robot, guiding it to understand and replicate the necessary support. Subsequently, the I-DRESS robot seamlessly extends its assistance to the individual, simplifying the dressing process and fostering a greater sense of independence. This remarkable technology not only showcases the potential of robotics in improving daily life but also highlights the collaborative synergy between human caregivers and assistive robots, paving the way for a more inclusive and supportive future.
“Our research focuses on developing AI techniques to improve quality of life”, shared Sylvain Calinon.
In their pursuit of developing cutting-edge solutions for dressing assistance, the team aims to grasp the nuanced requirements articulated by caregivers, users, and the robotic entities involved. By engaging in a comprehensive exploration of the unique needs and preferences of each stakeholder, the team strives to mold their approach into a seamless and effective dressing assistance system. This collaborative effort not only underscores the team’s commitment to inclusivity but also sets the stage for the creation of innovative solutions that cater to the diverse and dynamic needs of all parties involved.
The Future of User-Centric Innovation
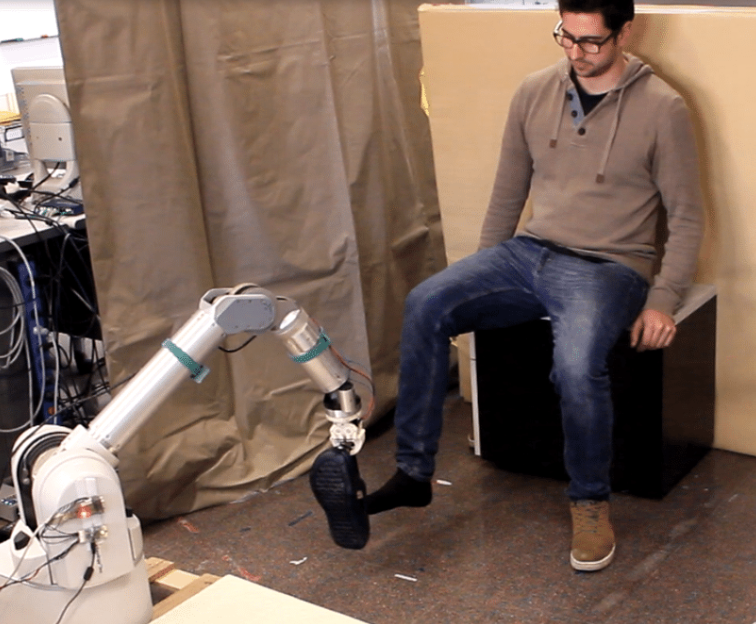
Exploring the fascinating landscape of assistive robots, projects like SWITCH and DrozBot showcase the remarkable strides being made in the domain of human-robot collaboration. SWITCH, designed to assist individuals in standing up and sitting down, boasts a unique combination of compliance and stiffness in various directions, allowing for the simulation of a virtual cane. This innovative approach provides users with essential support and autonomy in their daily movements.
Furthermore, the incorporation of geometry into robotics emerges as a pivotal element, expediting the learning process and necessitating precise encoding. While learning algorithms play a crucial role, the emphasis also lies on user-friendly software, ensuring accessibility and ease of operation.
In this dynamic landscape, DrozBot, the robot portraitist, stands out as a testament to learning from demonstration aspects, pushing the boundaries of what robots can achieve through observation and adaptation. Together, these projects exemplify the ongoing commitment to creating assistive robots that not only enhance functionality but also prioritize user experience and ease of interaction.
The journey into tele-operated robots reveals a captivating fusion of scientific inquiry and technological innovation. The vision extends beyond studying remote-controlled robotic bodies to empower individuals in navigating remote locations effortlessly. Sylvain Calinon’s research explores hazardous environments, showcasing robots autonomously learning through human demonstrations, revolutionizing human-robot collaboration.
In assistive robotics, the I-DRESS robot transforms dressing assistance with a three-party interaction involving caregivers, users, and robots. SWITCH and DrozBot exemplify user-centric innovation, offering compliance and stiffness for standing up and sitting down and showcasing learning from demonstration aspects, prioritizing functionality, user experience, and ease of interaction. The future of assistive robotics promises transformative solutions for individuals across various spectrums.
Watch our full video: