 Register here
Register here
“Just as animals have a wide variety of squishy and stretchy tissues in their bodies, soft robots are constructed of compliant materials that can adapt their shape and behavior to complex and dynamic unstructured environments and tasks,” said Hannah Stuart, Don M. Cunningham Assistant Professor at the University of California at Berkeley.
This is critical to enable real world interventions that can make a difference outside of the safe and controlled laboratory setting. New possibilities for robot applications that can make significant contributions to society have emerged thanks to the recent advancements and discoveries in soft materials for robot design
Plantoid robots
Barbara Mazzolai, Associate Director for Robotics and Director of the Bioinspired Soft Robotics Laboratory at the Istituto Italiano di Tecnologia (IIT), discussed the potential of robots inspired by natural organisms for exploration, surveillance and environmental protection.
In parallel with the development of robotic prototypes inspired by octopuses and worms, Mazzolai highlighted how plants can be used as a source of bioinspiration for soft robotics due to their distinctive movements and high flexibility. Such robots can integrate into natural ecosystems and collaborate with humans, use energy from the environment, and eventually biodegrade and become reusable.
“We need new rules to optimize the design of robots to reduce the energy consumption”, concluded Barbara Mazzolai.

Image credits: Istituto Italiano di Tecnologia – IIT
Soft robots in agriculture
“From its origins, soft robotics have been moved by the conviction that the wider and smarter use of soft and flexible materials could improve robot capabilities,” said Matteo Cianchetti, Assistant Professor at Scuola Superiore Sant’Anna.
The application of a new technological approach and bio-inspired designs has led to the development of innovative robotic devices that can interact with the environment in a gentle and efficient manner. For example, Cianchetti presented a functionalized soft robotic gripper for delicate produce harvesting, powered by learning-based control system.
The growing demand for agricultural automation, especially in the mushroom-picking sector, evidences the need for low-cost soft robotic grippers with built-in activation sensing, and AI capabilities to enable safe grasping, adaptable to the size and shape of the object, and versatile for efficient and reliable mushroom picking.
Bio-inspired underwater robots
Robots are not only inspired by terrestrial plants and animals, but also by marine species. Thus, Cecilia Laschi, Professor of Robotics at the National University of Singapore, emphasized that bio-inspiration in robotics was about learning principles from living beings.
Given the numerous human threats to oceans, including plastic pollution, there is a need to re-examine how underwater robot manipulation is carried out.
“If we go underwater, we have to make sure that we are not dispersing pollutants in the marine environment that we want to preserve. Soft robotics is giving us enormous opportunities because we are rethinking the materials robots are built,” explained Cecilia Laschi.
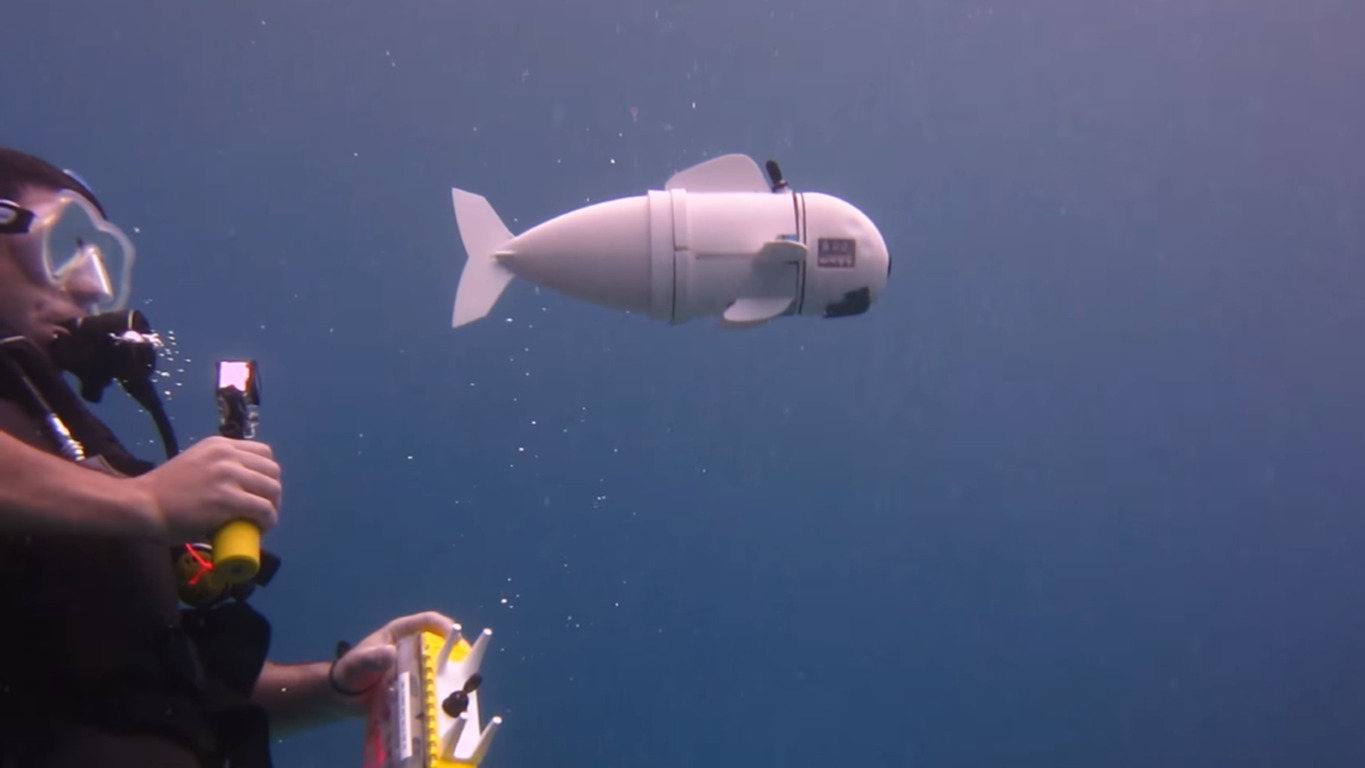
Image credits: MIT CSAIL
Robert Katzschmann, Assistant Professor of Robotics at ETH Zürich, agreed that building robots for underwater applications requires approximating underwater motion.
This involves dealing with a number of issues, such as “us[ing] technologies to build up muscles that do not make [engine] noise but still give enough deformation so we can build robots from that”, explained Robert Katzschmann, Assistant Professor at ETH Zürich.
Katzschmann believes that the field of bio-inspired robots shows promise and should be further developed to ensure that future robots are made of sustainable materials and technologies that do not harm the ocean environment. He envisions a future where robots placed in the ocean are not disposable and do not contribute to ocean pollution.
This webinar highlighted how by combining biology and robotics we can create bio-inspired soft robots that can be completely sustainable, with all robot components made from biodegradable materials.
Be sure to register for the upcoming Robotics for Good Webinar to find out how robots can be part of the global solution towards sustainability and what it takes for a robot to be sustainable.











